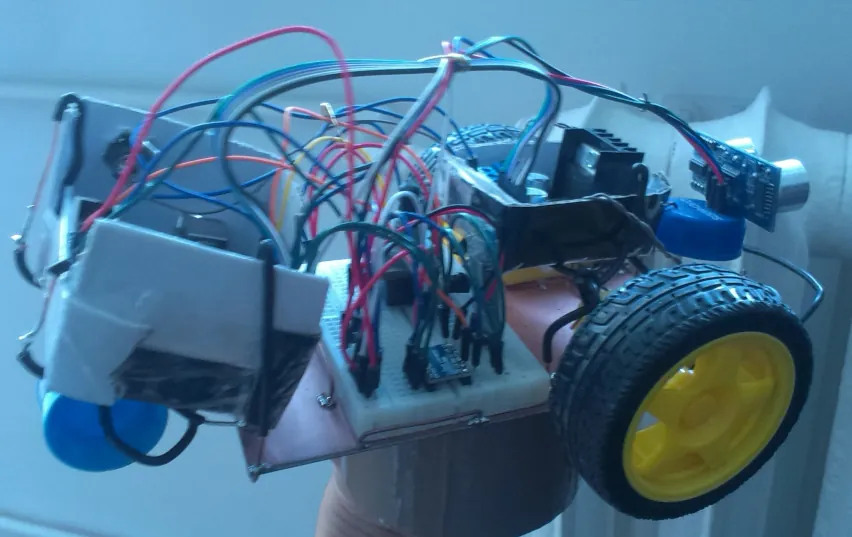
Recently, we got a 3D printer for our house. One of the reasons was a broken piece of a toilet hinge. The element was so specific that I couldn't find any replacements. I even tried to contact the toilet company for some info but got no answer. I have been writing down a "this can be 3D printed" list for quite some time now, but the hinge was definitely the most annoying one. The alternative was to buy a whole new toilet seat, just because of some small metal element. What a waste. I measured, printed the first prototype, measured again, and the second prototype has been working for some time already. You can see it in the picture in its place.
 I will definitely utilise this 3D printer more in the future. After all, the cost of a new toilet seat is way smaller than a whole 3D printer, even if you include the fact that a new seat would never match the toilet style (it's a really weird one, believe me). But now, a whole new world of capabilities has emerged. I can print literally everything that I need. Now, as an example, I am planning to design a bidet spray holder for my small hydraulic plan. I will share the results here I think, as well as some thoughts about the whole toilet paper hygiene situation, but that's a different topic.
I will definitely utilise this 3D printer more in the future. After all, the cost of a new toilet seat is way smaller than a whole 3D printer, even if you include the fact that a new seat would never match the toilet style (it's a really weird one, believe me). But now, a whole new world of capabilities has emerged. I can print literally everything that I need. Now, as an example, I am planning to design a bidet spray holder for my small hydraulic plan. I will share the results here I think, as well as some thoughts about the whole toilet paper hygiene situation, but that's a different topic.
The feeling of being able to create something that you need is really empowering. I can utilise my CAD skills, and my creativity is going to a whole different level. I had already heard that from people with 3D printers, but the feeling itself is something indescribable.
"Do serca podchodzi mi lont" – a fuse goes straight to my heart. These are the words I thought I heard in a song by Ewa Farna – a Polish-Czech artist.
One time, while listening to it, I came up with a joke idea. I asked an LLM to generate an image of a land attacking a girl. “Lont” – fuse – sounds similar to “ląd” – land. And so, it was a funny joke... well, at least if you're into this kind of humor.
Joke's on me, though, because the actual line is "Do serca podchodzi mi lód" – cold is creeping into my heart. Which, in fact, works just fine, and I guess it’s what the artist really meant to express.
Still, right after this line, the tempo increases and the song kind of explodes emotionally. I’ll keep singing “lont” anyway. It’ll be a reminder that I once tried to make a language joke out of a lyric that had already made one out of me.
 Well, at least we can use this humorous situation as a kind of LLM state log. To be honest, I’m kind of impressed that after just one prompt I got the first image, then another to turn it into ice, and one more to make them fight.
Well, at least we can use this humorous situation as a kind of LLM state log. To be honest, I’m kind of impressed that after just one prompt I got the first image, then another to turn it into ice, and one more to make them fight.
I’m not the best prompter. Nor am I an artist. Still, it was surprisingly easy to make. There’s no going back, I’m afraid. But... am I really afraid?
The world is always changing – it’s up to us whether we stay in one place.
Sometimes it is good to switch things up on the outside. At least, I hope so — there’s a strange kind of joy in those changes, and I’m sure it won’t be the last time. I think I would’ve done it anyway, even if I weren’t donating my hair.
Tattoos, though — that’s a different story. Nothing grows back there. Here, hesitation and fascination have blended together for years. And I feel like they’ll keep mixing a little longer.
Anyway, if you're interested in donating yourself:
Poland – Daj Włos! (Rak’n’Roll)
USA – Wigs for Kids
Great Britain – Little Princess Trust
I guess back in the day, pretty much everything spoken out loud was kind of official — especially for people who couldn’t read or write. People would go to great lengths to defend their "honor" if someone said something about them. Nowadays, no one really cares.
I mentioned illiteracy because later on, once things started getting written down, the written word carried more weight. Written stuff tends to stick around longer. Tell that to people dead from scurvy.
But now — with the internet? Who even knows what permanence means anymore. People sometimes don’t even read what they post online. But hey, did everyone really think through what they were saying back then, either? Maybe it’s not about permanence — maybe it’s just the sheer volume of messages, both real and synthetic. Maybe it’s about the level of broadcast.
Our leaky legal systems try to patch it up somehow — defamation laws, retractions — but Karen on Facebook will still call you a cretine anyway.
Procrastination doesn’t necessarily mean something bad. It all depends on your redirection vector — you can even use it as a weapon. My thesis supervisor calls it the "virtual work method": you clean the whole house just to avoid finishing a school project. As long as you’re not wasting time thinking about procrastination itself, you can use it to complete tasks that suit you better in the moment. Just like I’m updating the website right now.
Totally forgot about this "notebook". If youre waiting for ending of the previous note, I am sorry. I have no answers... Neither do I have any specific note now, but I hope to come back here with some revelations in the future.
Finishing something is a long and exhausting process. I will write more about it in the future, because now I am celebrating that everything works :D